Nowa tabela narzędzi SolidCAM 2021 pozwala definiować bardzo złożone zespoły narzędziowe. W artykule prezentujemy dwa przykłady narzędzi, rozbudowane pod względem definiowania.
W SolidCAM 2021 w nowej tabeli narzędzi można definiować bardzo złożone zespoły narzędziowe. W poprzedniej, pierwszej części artykułu na ten temat, zaprezentowaliśmy dość proste w strukturze narzędzia frezarskie. W tej części zostaną pokazana dwa przykłady narzędzi, trochę bardziej rozbudowanych pod względem definiowania.
Definiowanie narzędzia typu wytaczadło
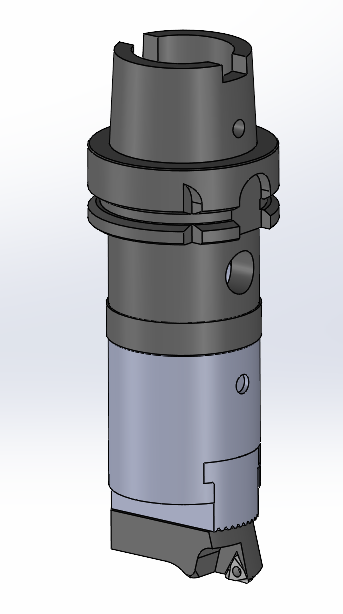
Dla uproszczenie przyjmijmy, że narzędzie to składa się tylko z 4 następujących części (pokazane wraz z odpowiednimi układami współrzędnych):
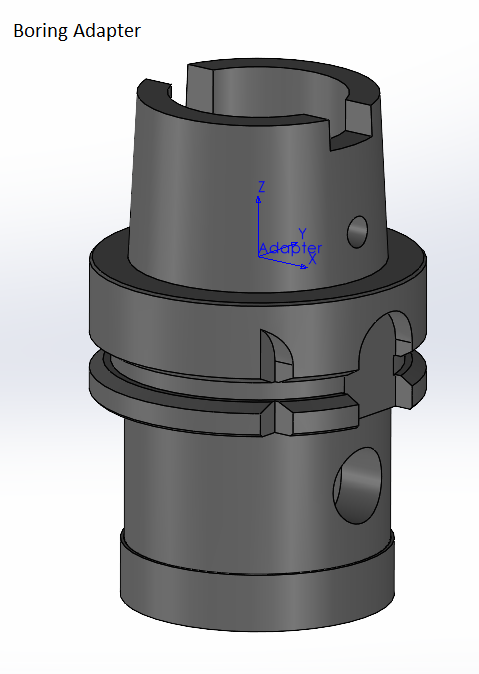
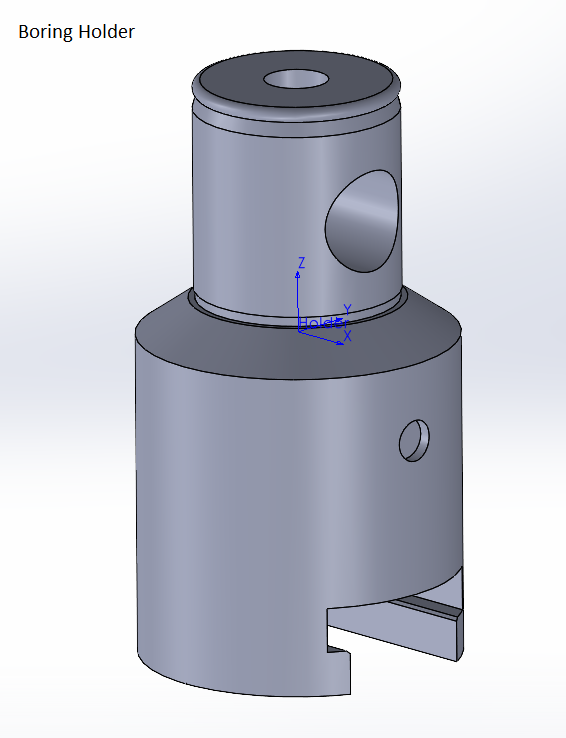
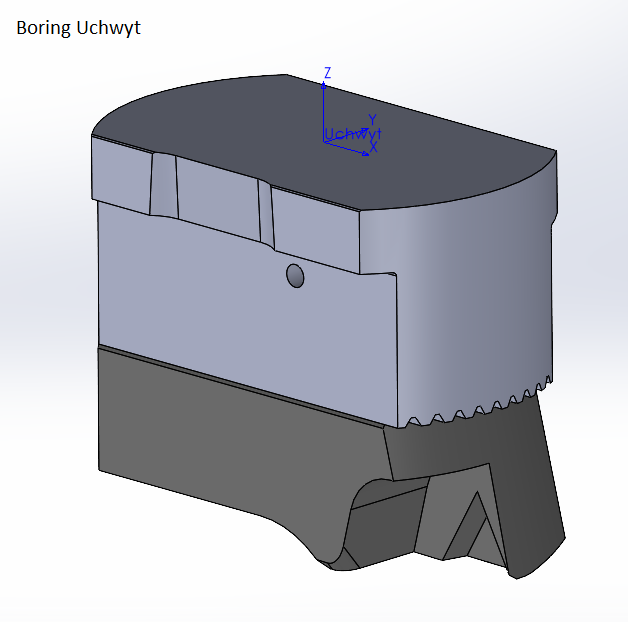
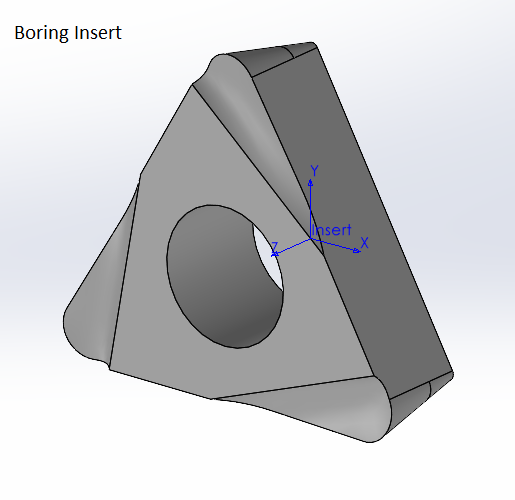
Jeśli chodzi o trzy pierwsze elementy, to osie Z ich układów współrzędnych są współliniowe, a orientacje osi X i Y zgodne (czyli różnią się względem siebie przesunięciem wzdłuż osi Z). Inaczej jednak jest w przypadku układu współrzędnych związanym z płytką – tutaj oś Z jest skierowana prostopadle do tylnej ściany płytki. Płaszczyzna XY tego układu współrzędnych pokrywa się z płaszczyzną mocowania płytki na elemencie ‘Boring Uchwyt’. Tak musi być zorientowany układ współrzędnych dla płytki skrawającej (kierunek osi Z) przy narzędziu frezarskim.
Kolejnym krokiem jest zapisanie tych elementów w formacie STL z właściwymi układami współrzędnych.
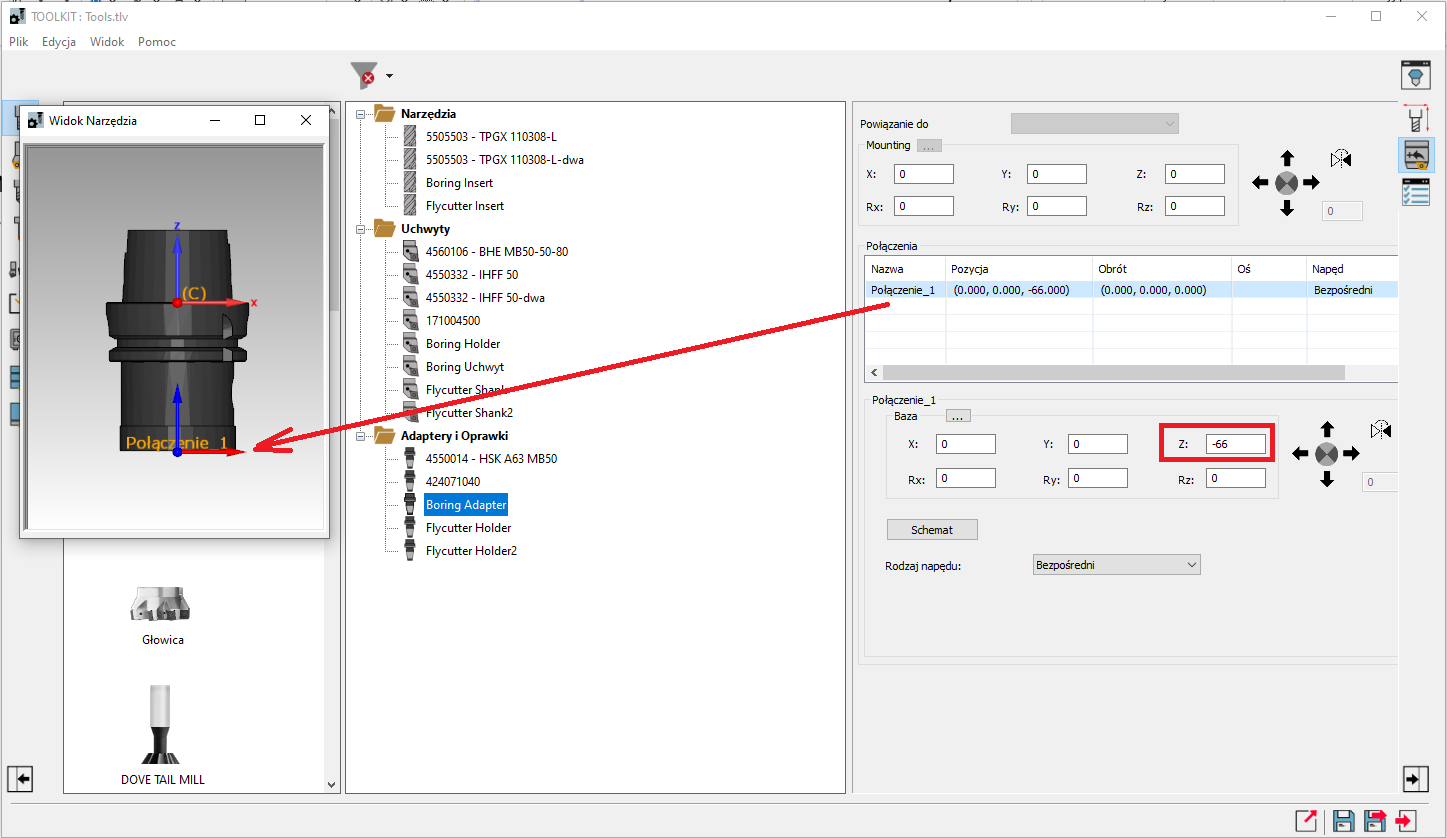
Teraz należy wstawić elementy narzędzia zapisane w STL do pliku komponentów (*.tlv) dodając do każdego z nich pozycję ‘Połączenia’ z kolejnym, ‘dolnym’ komponentem. Pozycja połączenia (współrzędne) to nic innego, jak lokalizacja układu współrzędnych kolejnego komponentu. W przypadku dwóch pierwszych elementów kolejne połączenia to po prostu wartość przesunięcia układu w osi Z:
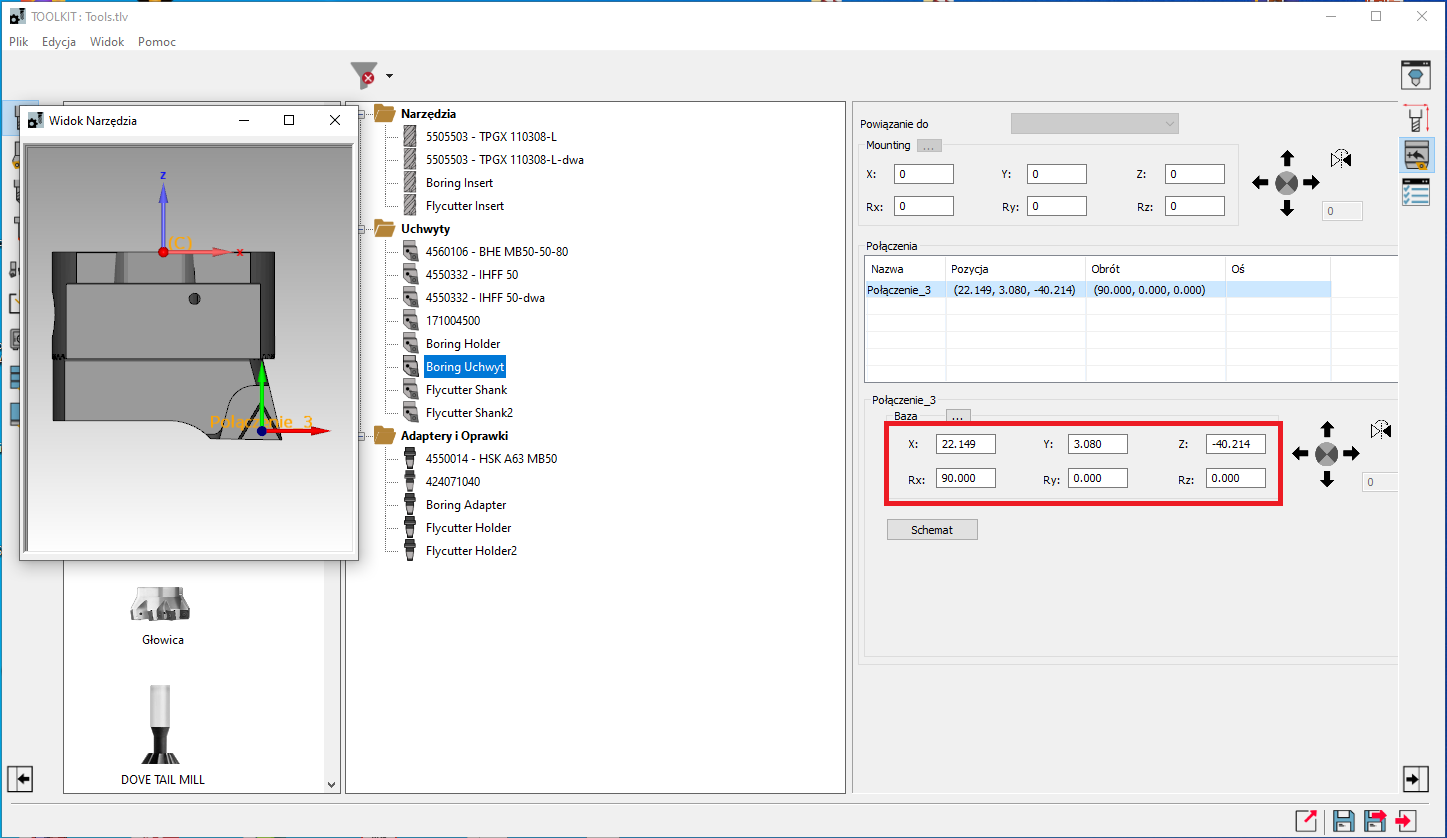
Inaczej sytuacja wygląda z układem współrzędnych płytki – tutaj przesunięcie jest nie tylko w osi Z, ale także w osiach X i Y oraz … obrót układu współrzędnych. O ile przesunięcie pomiędzy układami współrzędnych można łatwo określić w SOLIDWORKS – mierząc odległość pomiędzy początkami tych układów, o tyle obrót może być trudniejszy do zmierzenia.
Z pomocą przychodzi aplikacja SolidCAM Utilities, której jedna z funkcjonalności podaje translacje układów współrzędnych (ilustracja poniżej):
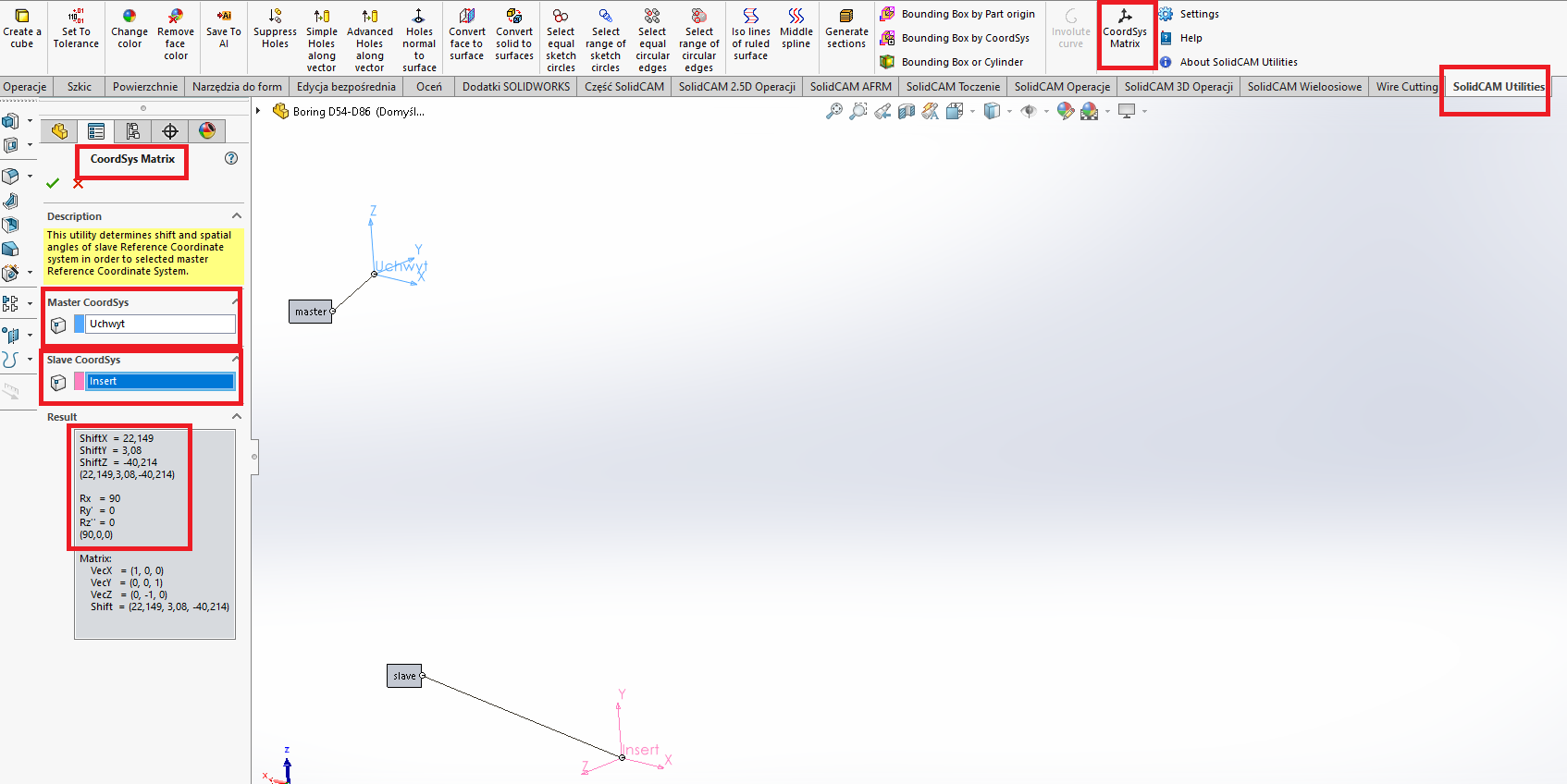
Jak widać z powyższej ilustracji przesunięcie układu współrzędnych ‘Insert’ w stosunku do układu ‘Uchwyt’ wynosi: x=22.149; y=3.08; z=-40.214 oraz obrót wokół x (Rx) wynosi 90 (stopni). I takie wartości należy wpisać w ‘Połączenie’ części ‘Boring Uchwyt’ (Połączenie_3).
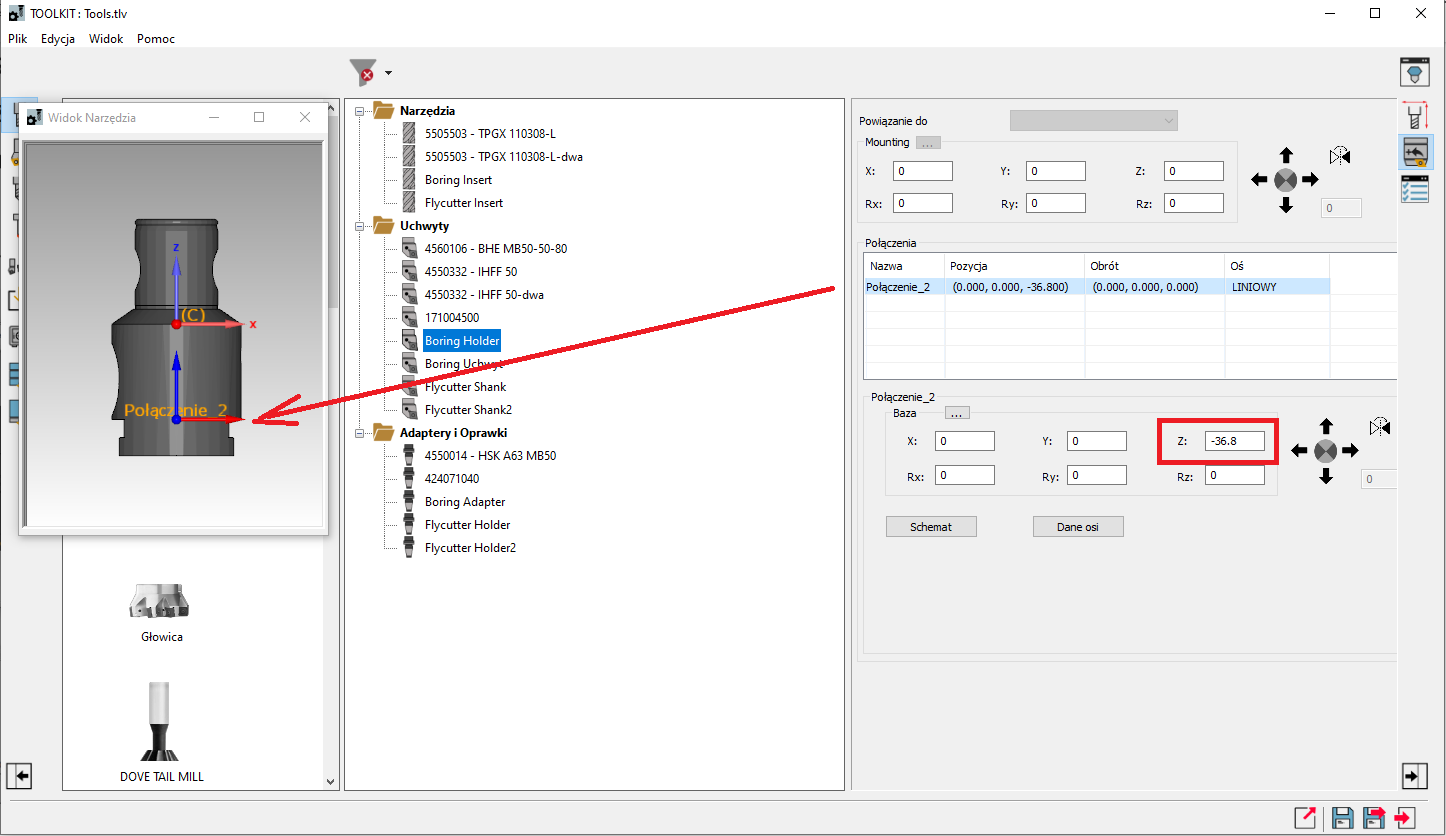
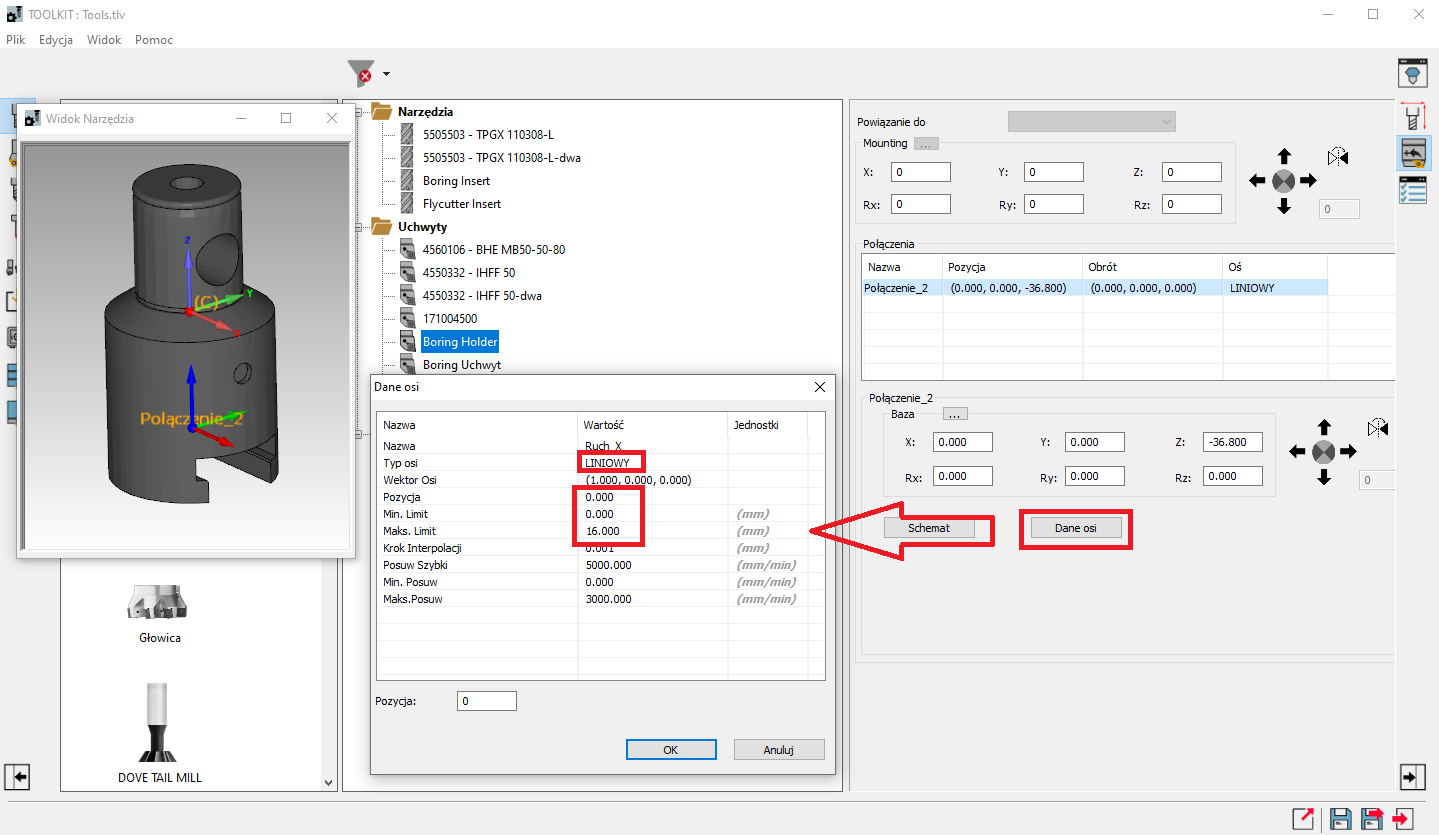
Ale to jeszcze nie wszystko – element (w tym przykładzie) ‘Boring Uchwyt’ musi mieć możliwość ruchu (wysuwania się) tak, aby móc wytaczać średnice z zakresu 54-86. Taki ruch należy zdefiniować w ‘wyższym’ komponencie czyli w ‘Boring Holder’. Pokazuje to kolejna ilustracja.
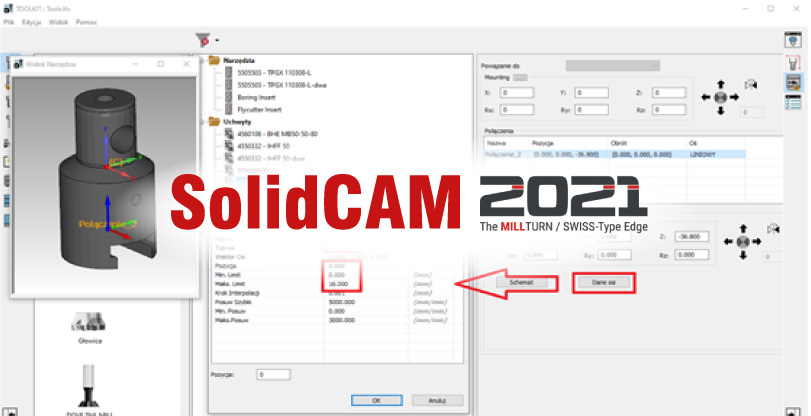
Należy wybrać przycisk ‘Dane osi’ i w okienku ustawić następujące parametry:
- Typ osi – Liniowa
- Wektor osi – kierunek ruchu, w tym przypadku będzie to ruch w osi X, czyli (1,0,0)
- Min. Limit – minimalna wartość wysunięcia (w tym przypadku 0, co odpowiada średnicy D54)
- Maks. Limit – maksymalna wartość wysunięcia (16, co odpowiada średnicy wytaczania D86)
Po zakończeniu definiowania komponentów w pliku *tlv, należy ‘zmontować’ narzędzie z tych składowych. Najlepiej zrobić to w pliku *tlm, gdyż z tym plikiem jest powiązana konkretna maszyna (frezarka) poprzez plik postprocesora *.vmid, a to jest z kolei istotne ze względu na osie maszyny.
Aby określić wielkość wysunięcia dla zadanej średnicy wystarczy wykonać proste działanie:
Wysunięcie=(średnica_zadana – średnica_minimalna(54))/2, np. dla D74 wysunięcie musi być równe 10.
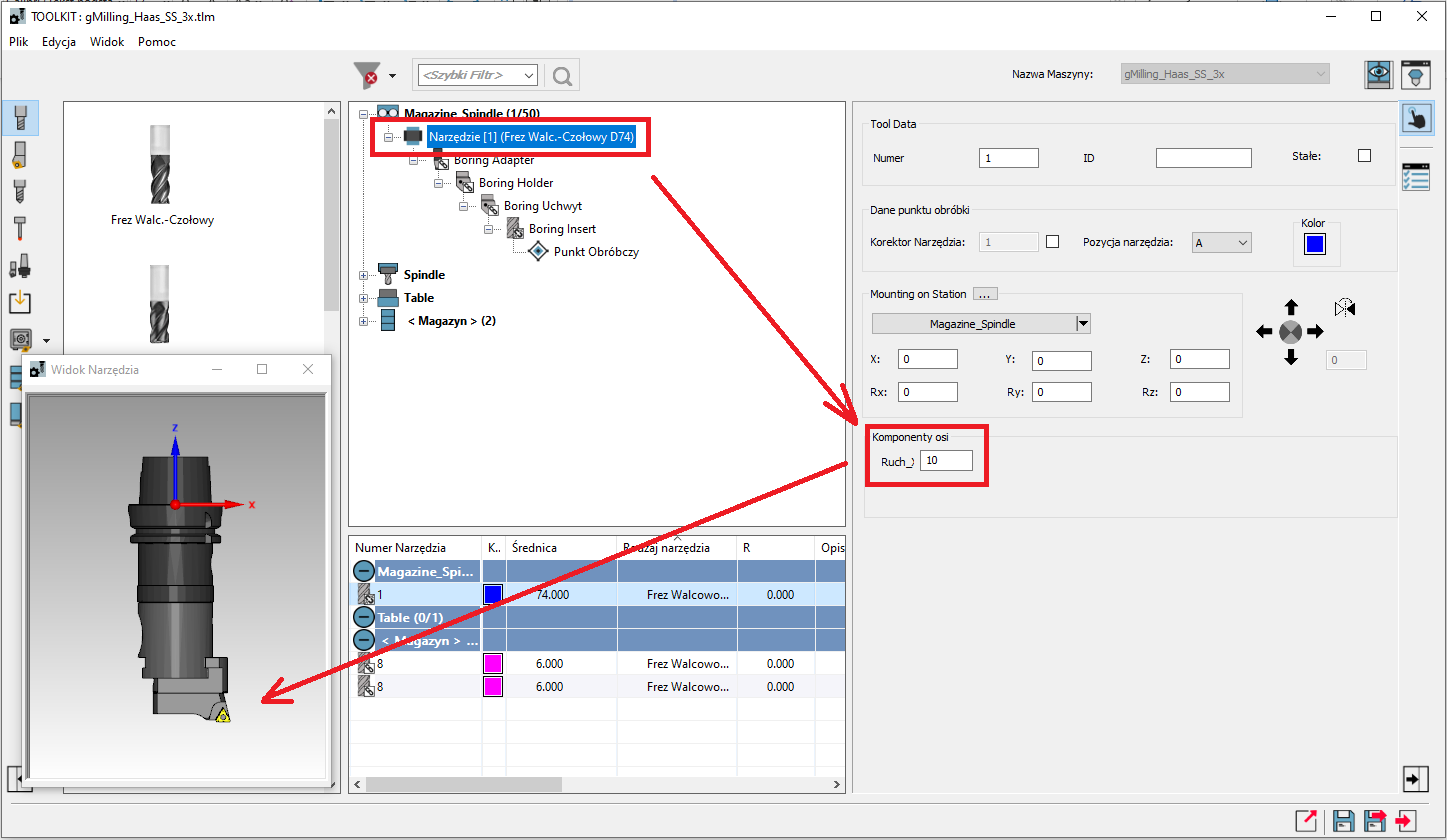
Wysunięcia (zmiany średnicy wytaczania) dokonuje się na wybierając pozycję z nazwą narzędzia w drzewie (np. w tym przypadku – Narzędzie[1](Frez Walc.-Czołowy D74)).
Definiowanie narzędzia z wysuniętą częścią obróbczą
W kolejnym elemencie stopień trudności definiowania zwiększa się, ponieważ wysunięcie części obróbczej następuje po kącie w stosunku do osi maszyny.
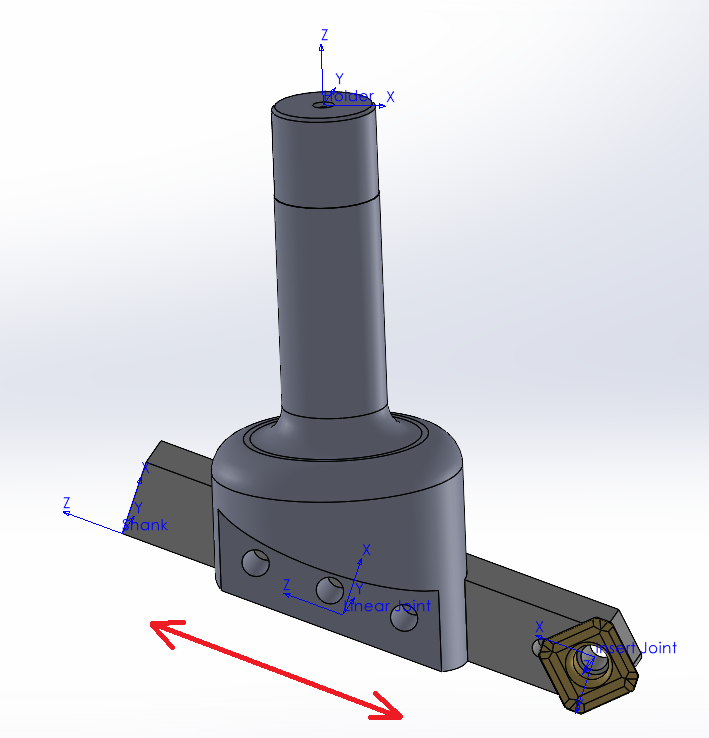
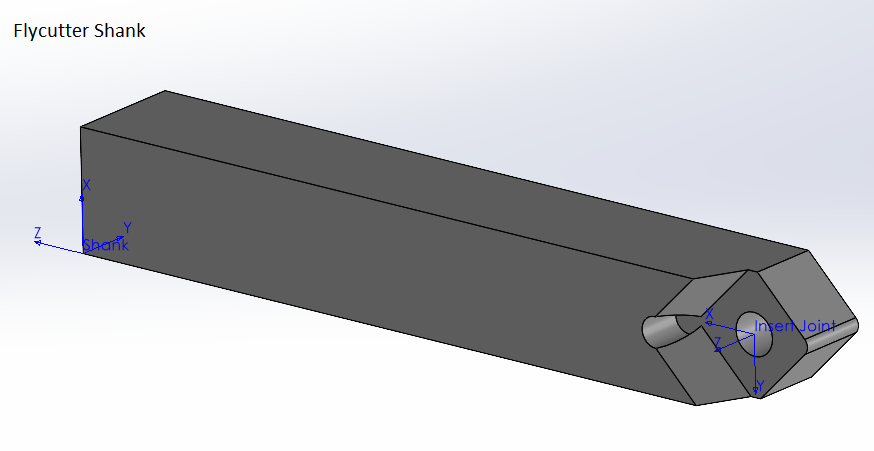
Poniżej składowe narzędzia wraz z układami współrzędnych (dla lepszej widoczności układów współrzędnych – element ‘Flycutter Holder’ pokazano w przekroju):
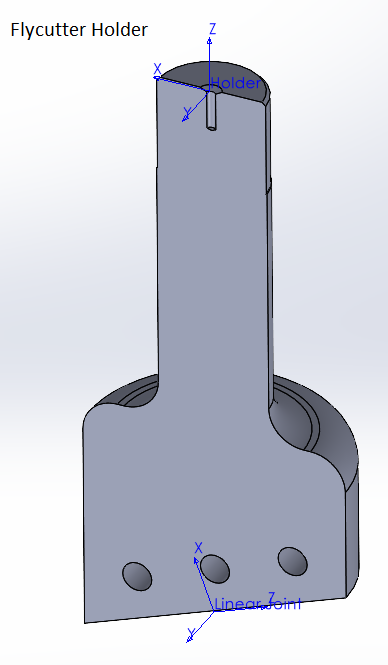
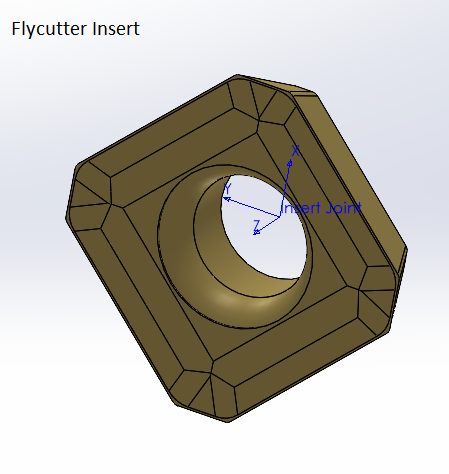
W przypadku płytki skrawającej, podobnie jak poprzednio, oś Z musi być zorientowana prostopadle do płytki (tutaj: do tylnej części płytki, bo to jest płaszczyzna). Pewną nowością może być zdefiniowanie punktu połączenia w elemencie ‘Flycutter Holder’ jako układu współrzędnych o nazwie ‘Linear Point’. Początek tego układu jest umieszczony w osi Z narzędziam ale orientacja jest taka jak układu ‘Flycutter Shank’.
Zapisujemy elementy jako STL z odpowiednimi układami współrzędnych i przechodzimy do umieszczania ich w pliku z komponentami. Przy każdym elemencie (oprócz płytki) wstawianym do pliku *tlv należy zdefiniować punkt połączenia z kolejnym (‘dolnym’) komponentem.
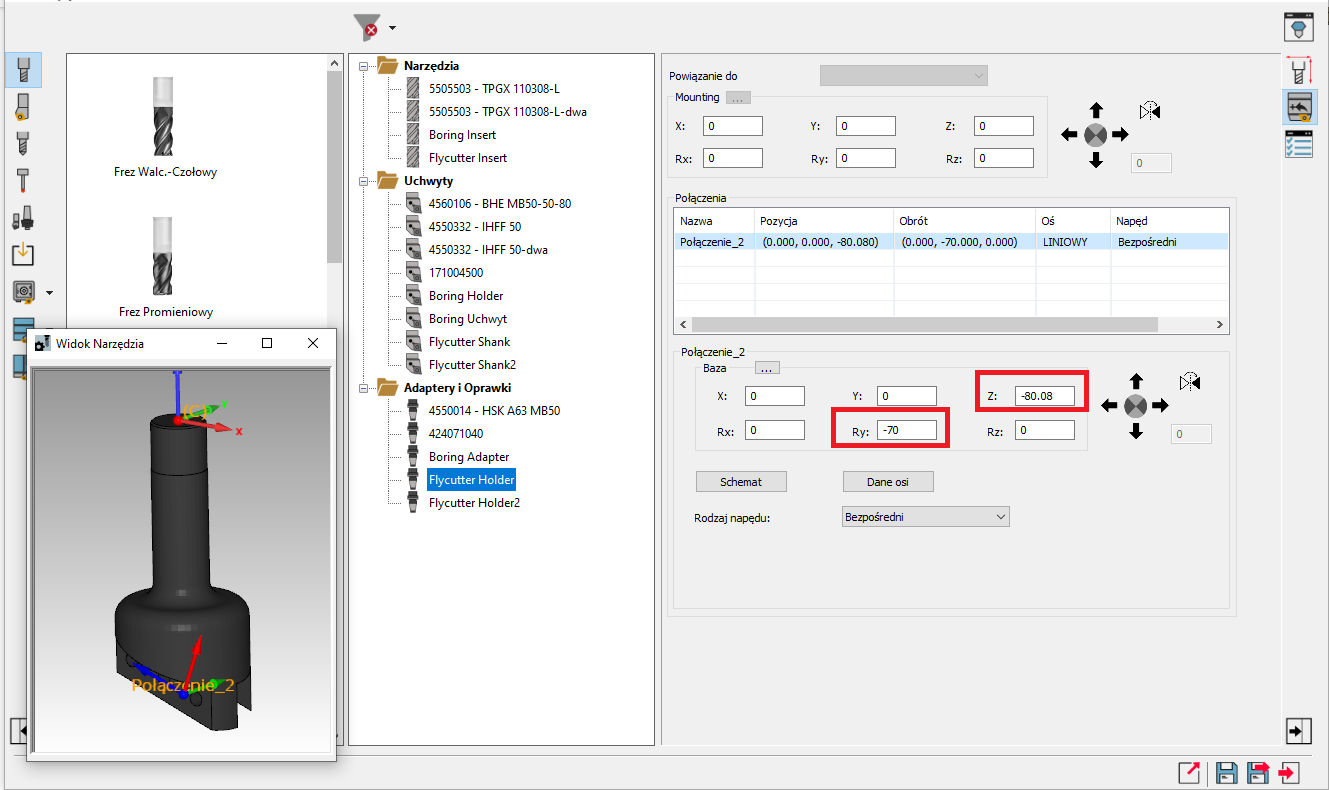
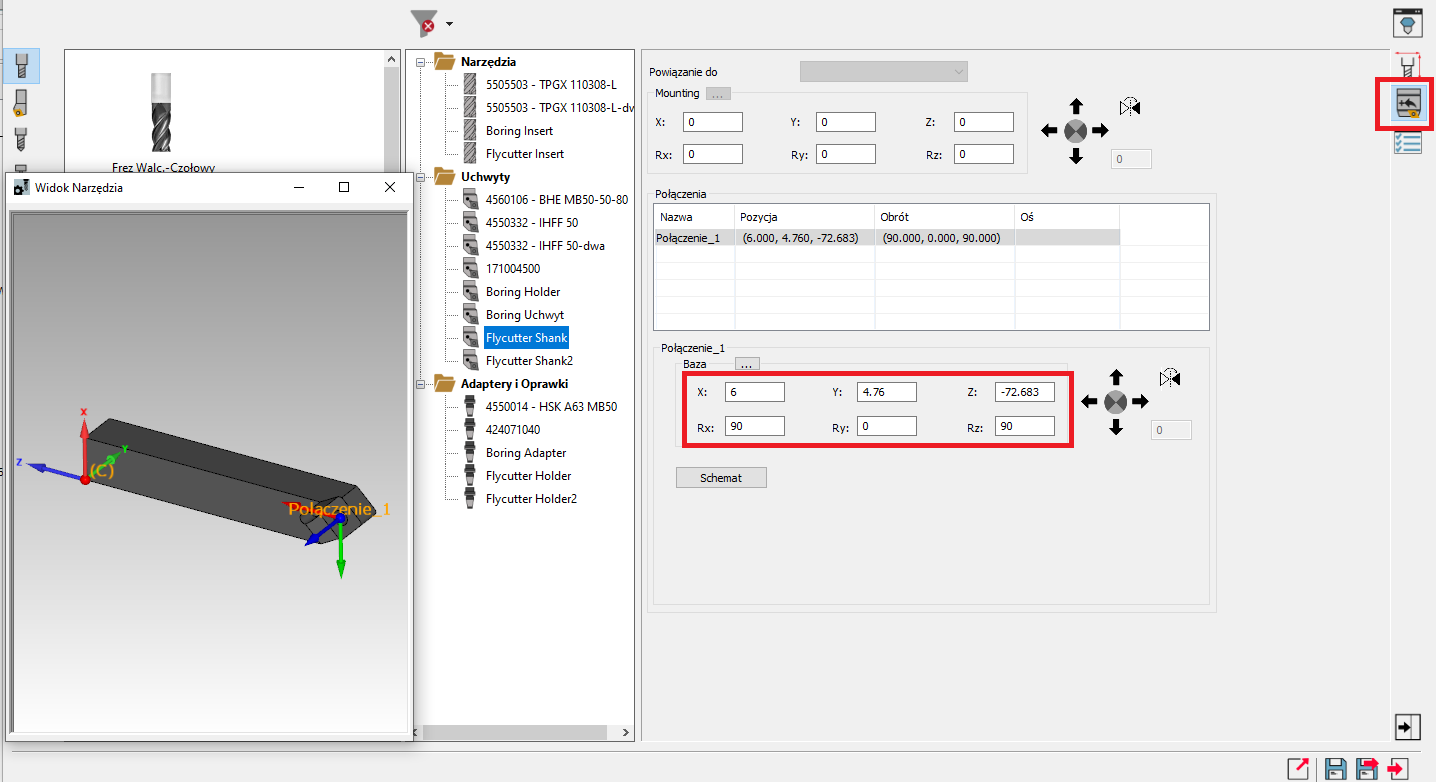
W tym przypadku łatwo wyznaczyć położenie układu współrzędnych ‘Połączenie_2’ w stosunku do układu montażowego elementu ‘Flycutter Holder’. Przesunięcie w osi Z wynosi -80.08, a obrót wokół osi Y=-70 stopni.
Po wstawieniu elementu ‘Flycutter Shank’ należy także zdefiniować współrzędne punktu połączenia z płytką (‘Flycutter Insert’) podając translację układu współrzędnych oraz jego obrót. Można to wyznaczyć w SOLIDWORKS mierząc odpowiednie wartości albo wykorzystać wspomniane wcześniej narzędzie – ‘SolidCAM Utilities’.
Podobnie jak w poprzednim przykładzie, element ‘Flycutter Shank’ musi mieć możliwość ruchu (wysuwanie), trzeba więc w połączeniu w ‘wyższym’ elemencie (‘Flycutter Holder’) zdefiniować połączenie liniowe (jak pokazano poniżej):
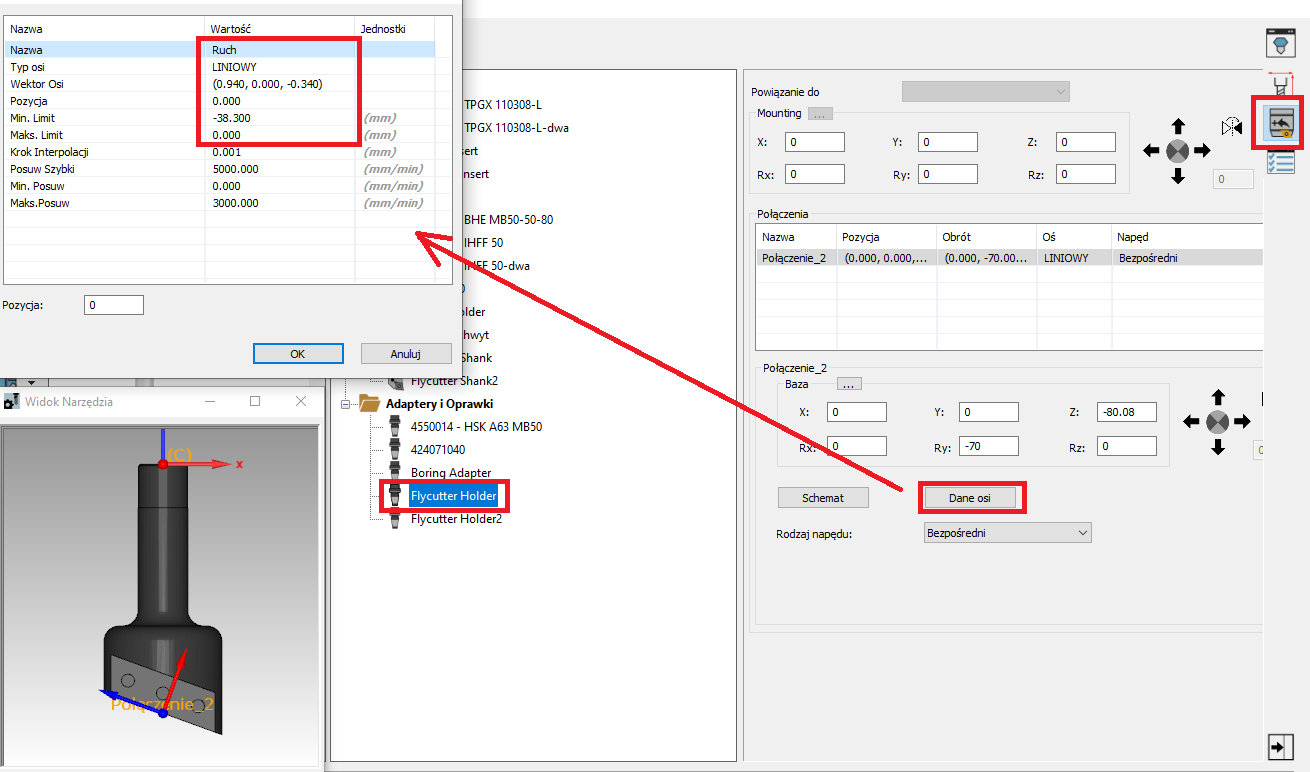
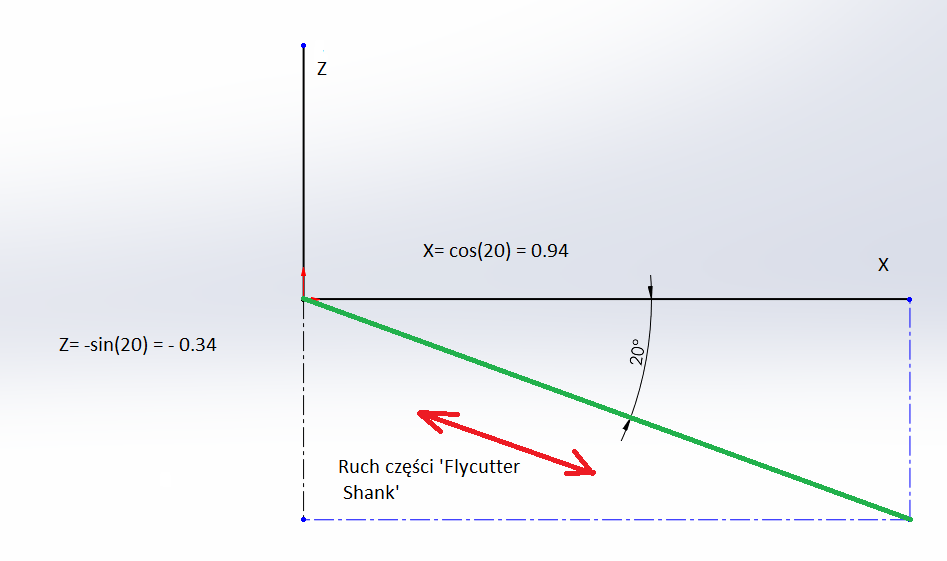
Kluczowym parametrem będzie tutaj ‘Wektor Osi’. W tym przypadku bowiem ruch wysuwania nie odbywa się wzdłuż tylko jednej osi, ale w dwóch osiach (X i Z) i należy podać zależność tego ruchu. Sposób jego policzenia pokazuje poniższa ilustracja. Ruch odbywa się wzdłuż kierunku pokazanego odcinkiem o kolorze zielonym i ten ruch musi być zamieniony na wartości w poszczególnych osiach X oraz Z.
Jak łatwo zauważyć współrzędna X to jest cosinus kąta 20, a Z sinus tego kąta ale ze znakiem minus. Stąd wartości wektora translacji wynoszą (0.94,0,-0.34). Takie wartości należy podać w parametrze ‘Wektor Osi’.
Ważne także jest określenie maksymalnej i minimalnej wartości wysunięcia. W tym przypadku maksymalne wysunięcie jest dla położenia początkowego elementu ‘Flycutter Shank’ (dla k=0), a minimalne dla k=-38.3 (jak widać wysunięcie ‘działa’ tylko w obszarze ujemnych wartości).
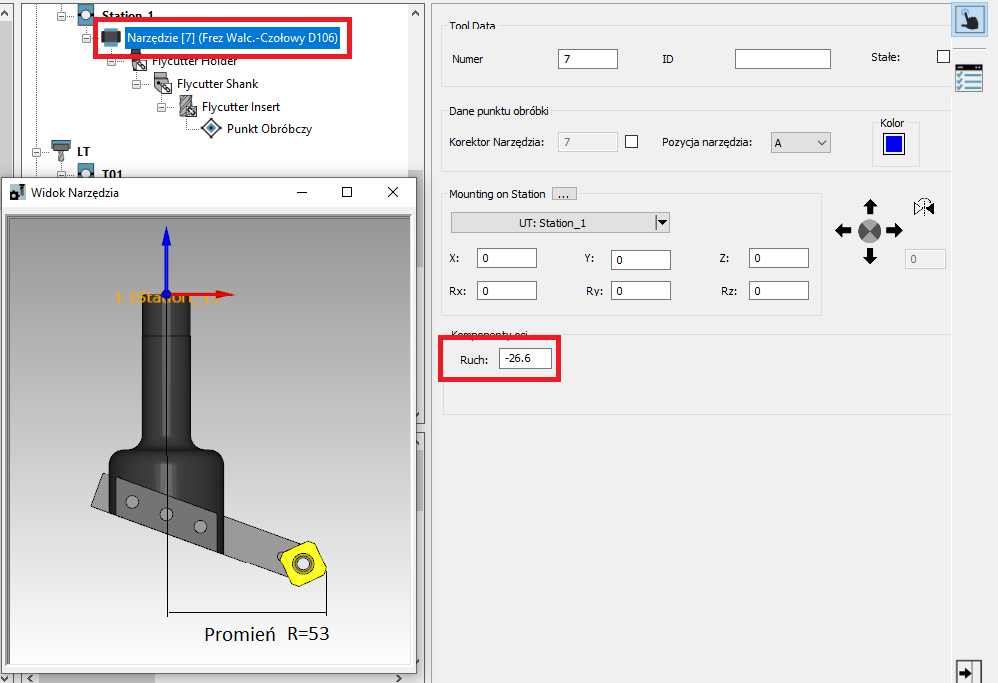
Wartość wysunięcia(k) w zależności od zadanego promienia (R) można policzyć z zależności:
k = (R – 78)/cos20, gdzie 78 jest wartością promienia dla początkowego (maksymalnego) wysunięcia (k=0), minimalne wysunięcie wynosi k=-38.3 co odpowiada promieniowi 42). Np. Promień wysunięcia ma mieć 53, wtedy k=(53-78)/0.94 = -26.6
{kind=link}